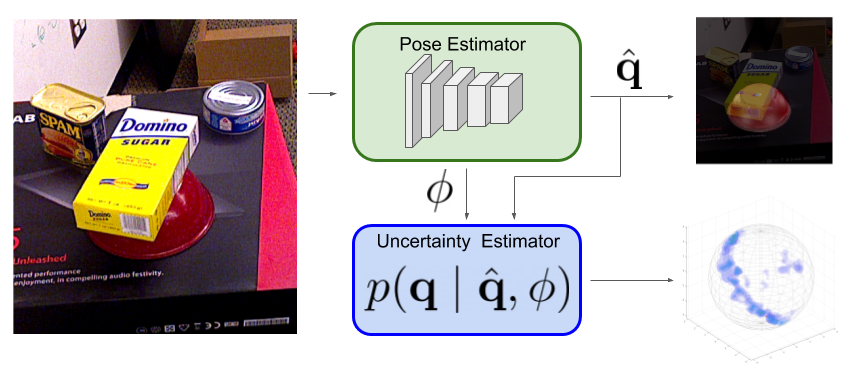
| For robots to operate robustly in the real world, they should be aware of their uncertainty. However, most methods for object pose estimation return a single point estimate of the object's pose. In this work, we propose two learned methods for estimating a distribution over an object's orientation. Our methods take into account both the inaccuracies in the pose estimation as well as the object symmetries. Our first method, which regresses from deep learned features to an isotropic Bingham distribution, gives the best performance for orientation distribution estimation for non-symmetric objects. Our second method learns to compare deep features and generates a non-parameteric histogram distribution. This method gives the best performance on objects with unknown symmetries, accurately modeling both symmetric and non-symmetric objects, without any requirement of symmetry annotation. We show that both of these methods can be used to augment an existing pose estimator. Our evaluation compares our methods to a large number of baseline approaches for uncertainty estimation across a variety of different types of objects.
|