Brian OkornI received my PhD at the CMU Robotics Institute as part of the R-PaD Lab. My goal is to develop vision systems that allow robots to interact intelligently with novel objects. In pursuit of this goal, I have developed zero-shot, and self-supervised methods of learning pose estimation, object detection, and scene flow prediction. Prior to joining CMU, I worked as a researcher in the Unmanned Systems Branch of the Naval Information Warfare Center (NIWC) Pacific, formerly SPAWAR System Center Pacific, developing perception algorithms for surface, underground, and littoral robots and have worked on vision systems for the NASA Robonaut with the Johnson Space Center under the NSTRF Fellowship. Email / GitHub / Google Scholar / LinkedIn / CV |

|
ResearchMy research centers on object-centric vision for manipulation with a focus on zero-shot and self-supervised methods. |
|
TAX-Pose: Task-Specific Cross-Pose Estimation for Robot ManipulationChuer Pan*, Brian Okorn*, Harry Zhang*, Ben Eisner*, David Held Conference on Robot Learning (CoRL), 2022 [PDF] [Project Page] [Video] |
|
Deep Projective Rotation Estimation through Relative SupervisionBrian Okorn*, Chuer Pan*, Martial Hebert, David Held Conference on Robot Learning (CoRL), 2022 [PDF] [Project Page] [Video] |
|
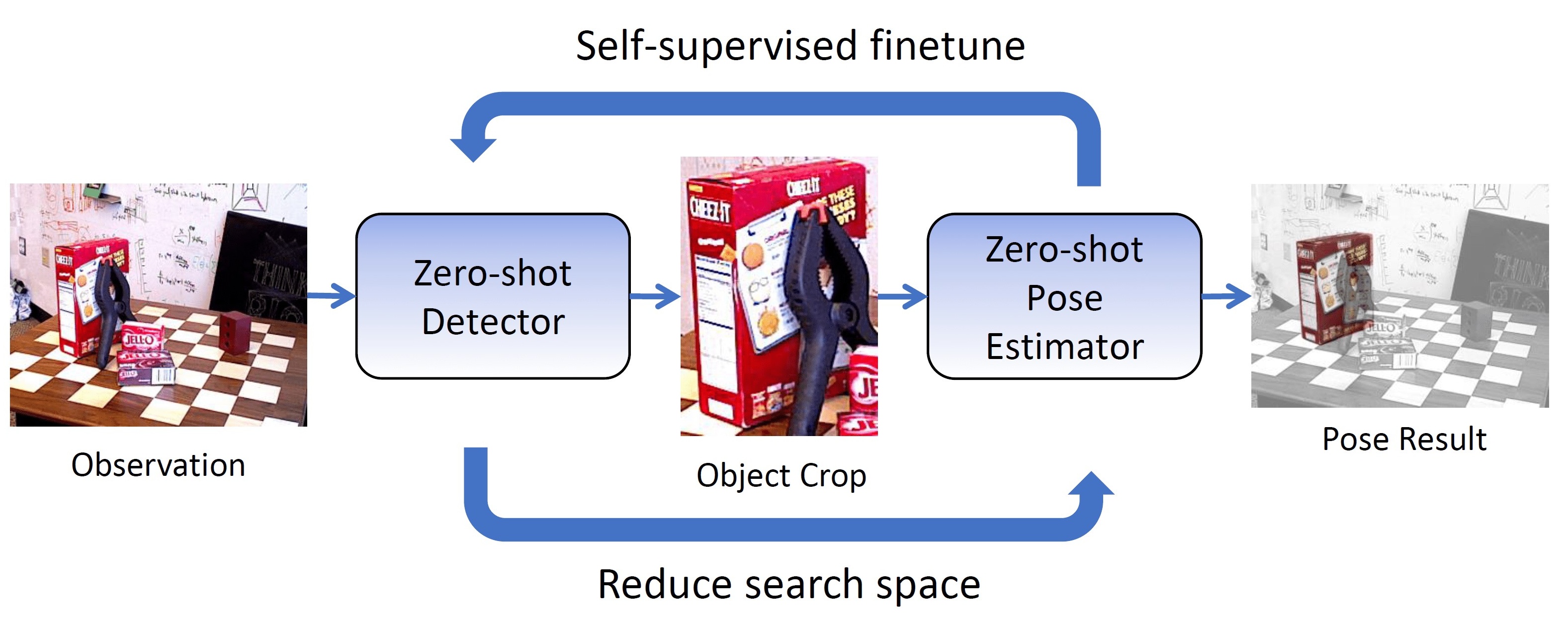
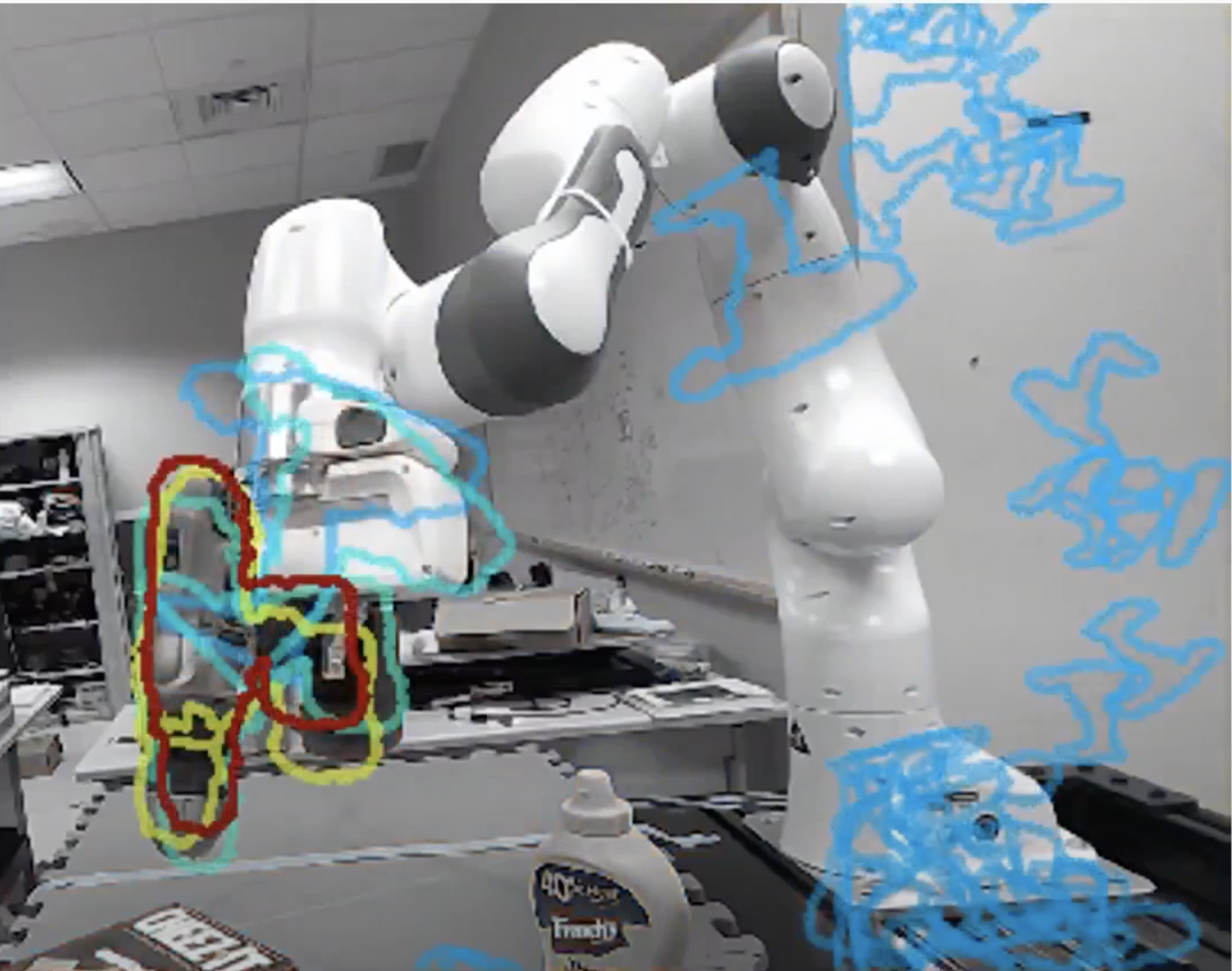
OSSID: Online Self-Supervised Instance Detection by (and for) Pose EstimationQiao Gu, Brian Okorn, David Held Robotics and Automation Letters (RA-L) with presentation at the International Conference of Robotics and Automation (ICRA), 2022 [PDF] [Video] [Long Video] [Code] |
|
IFOR: Iterative Flow Minimization for Robotic Object RearrangementAnkit Goyal, Arsalan Mousavian, Chris Paxton, Yu-Wei Chao, Brian Okorn, Jia Deng, Dieter Fox Conference on Computer Vision and Pattern Recognition (CVPR), 2022 [PDF] [Project Page] |
|
|
Object Pose Estimation without Direct SupervisionBrian Okorn PhD Thesis, 2022 [PDF] |
|
Self-Supervised Point Cloud Completion via InpaintingHimangi Mittal, Brian Okorn, Arpit Jangid, David Held British Machine Vision Conference (BMVC), 2021 [PDF] [Project Page] [Video] |
|
ZePHyR: Zero-shot Pose Hypothesis RatingBrian Okorn*, Qiao Gu*, Martial Hebert, David Held International Conference of Robotics and Automation (ICRA), 2021 [PDF] [Project Page] [Video] [Long Video] [Code] |
|
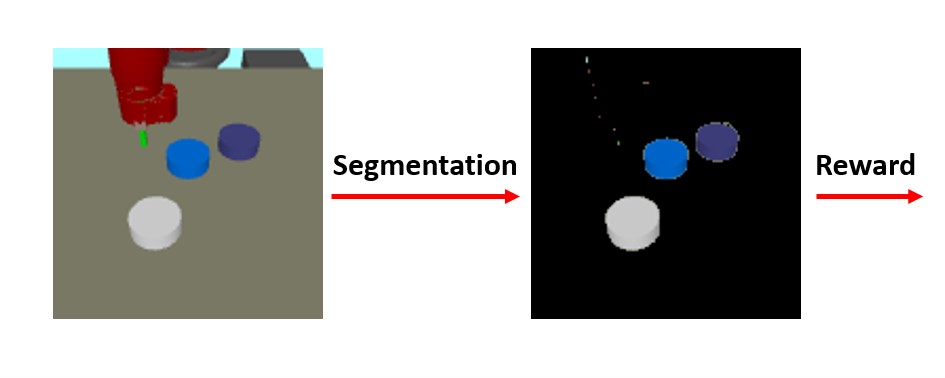
Visual Self-Supervised Reinforcement Learning with Object ReasoningYufei Wang*, Gautham Narayan Narasimhan*, Xingyu Lin, Brian Okorn, David Held Conference on Robot Learning (CoRL), 2020 [PDF] [Project Page] [Code] |
|
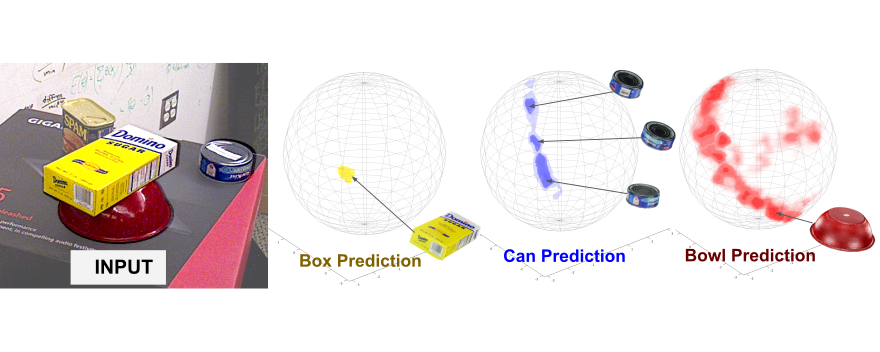
Learning Orientation Distributions for Object Pose EstimationBrian Okorn, Mengyun Xu, Martial Hebert, David Held International Conference on Intelligent Robots and Systems (IROS), 2020 [PDF] [Project Page] [Video] |
|
Cloth Region Segmentation for Robust Grasp SelectionJianing Qian*, Thomas Weng*, Luxin Zhang, Brian Okorn, David Held International Conference on Intelligent Robots and Systems (IROS), 2020 [PDF] [Project Page] |
|
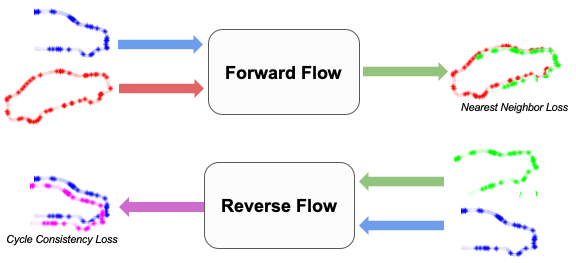
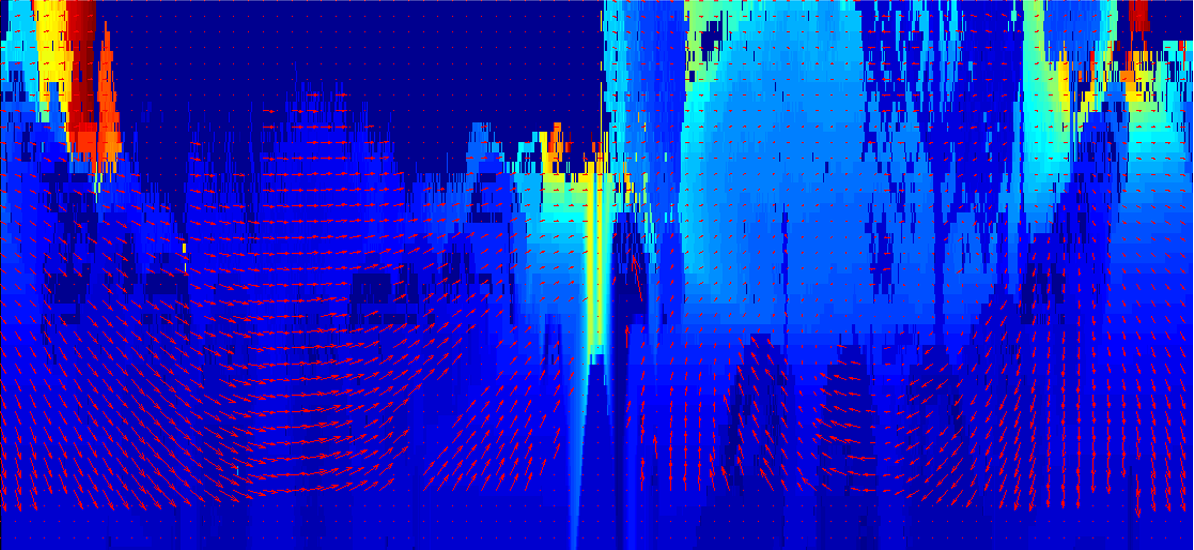
Just Go with the Flow: Self-Supervised Scene Flow EstimationHimangi Mittal, Brian Okorn, David Held Conference on Computer Vision and Pattern Recognition (CVPR), 2020 [PDF] [Project Page] [Teaser Video] [Video] [Code] |
|
Learning Adaptive Sampling Distributions for Motion Planning by Self-ImitationRatnesh Madaan, Sam Zeng, Brian Okorn, Sebastian Scherer International Conference on Intelligent Robots and Systems (IROS), Workshop on Machine Learning in Robot Motion Planning, 2018 [PDF] |

|
Counter Tunnel Exploration, Mapping, and Localization with an Unmanned Ground VehicleJacoby Larson, Brian Okorn, Tracy Pastore, David Hooper, Jim Edwards SPIE Unmanned Systems Technology, 2014 [PDF] |
|
Ego-Motion Estimation on Range Images using High-Order Polynomial ExpansionBrian Okorn, Josh Harguess Conference on Computer Vision and Pattern Recognition Workshops (CVPR-W), 2014 [PDF] |

|
Smuggling Tunnel Mapping using Slide Image RegistrationBrian Okorn Master’s Thesis, 2011 [PDF] |
|
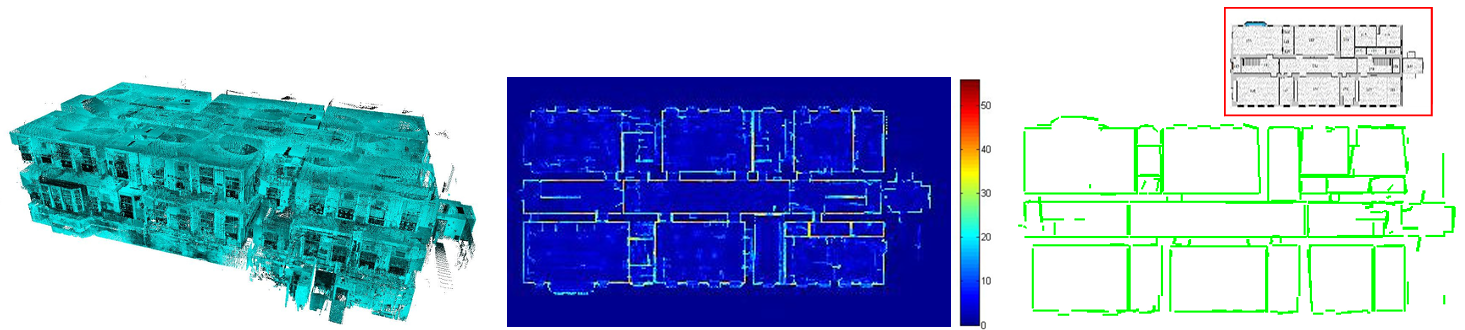
Toward Automated Modeling of Floor PlansBrian Okorn, Xuehan Xiong, Burcu Akinci, Daniel Huber 3D Data Processing, Visualization and Transmission Conference (3DPVT), 2010 [PDF] |

|
Using Laser Scanners for Modeling and Analysis in Architecture, Engineering, and ConstructionDaniel Huber, Burcu Akinci, Pingbo Tang, Antonio Adan, Brian Okorn, Xuehan Xiong Conference on Information Sciences and Systems (CISS), 2010 [PDF] |
|
Design and source code from Leo Keselman's website, originally from Jon Barron's website |